基于機器視覺識別技術,對機器人抓取系統進行設計,能夠根據零件的圖形識別與定位進行自動精準抓取,從而完成生產過程中的自動裝配。該技術應用后,能夠大幅度提升自動裝配生產線的工作效率,也能避免在生產過程中出現抓取錯誤以及其他生產質量問題。
機器視覺識別技術包含預處理與分割、特征提取與識別、零件定位。

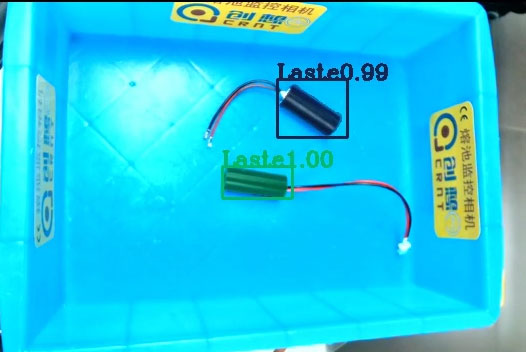
(圖來源于互聯網,與本文無關)
機器視覺識別系統首先需要對零件進行預處理與分割,判斷零件的圖像參數。利用視覺傳感器掃描零件,根據掃描所得到的參數,對零件所在位置,以及零件的基本圖形生成預期模型。排除在分析過程中干擾因素帶來的影響,并在此基礎上進行濾波后的預處理。通過預處理并對圖像進行獨立分割后,能夠確定單一零件所在位置。在此基礎上開展的后續分析任務,彼此之間才不會產生干擾。預處理與分割過程中,對于參數干擾還應該加強控制,能夠在分割過程中排除干擾,最大程度確保使用安全性。分割的闕值由最優闕值化方法確定,直方圖采用正態分布的概率密度函數近似,正態分布參數的估計按照使物體和背景間的灰度變化最大化來選取。
對零件圖像進行識別處理中需要針對零件的特征進行提取,通過特征提取確定零件邊緣信息,并對零件的邊緣數據精準描述。在此基礎上,構建生成零件識別后的圖像綜合處理控制能力,根據處理過程中的各類分割信息,對最終的功能結構進一步強化。特征提取與識別是相對的功能,需要連續進行,并且在特征提取分析期間,還應該描述出零件在自動裝配生產線上的運動情況,在此基礎上才能夠根據零件的運動情況以及具體所在位置,確定接下來需要進行的生產任務。在特征提取以及識別過程中,對于圖像的預處理參數誤差需要及時調整,這一環節最重要的是對邊緣特征精準確定,并對預處理階段產生的各類分割誤差校對。確保特征提取識別后最終的圖像綜合控制能力能夠得到提升,才能進入到接下來的自動裝配生產階段。對生產過程中的各類特征進行動態描述,識別零件的具體位置,進行自動化抓取,完成對零件的綜合控制。
基于零件識別與圖像處理基礎上進行的零件自動裝配,最終功能是對零件進行定位。在零件定位后,配合抓取動作,直接完成零件的生產調控。抓取過程中綜合調整零件的各項參數,根據參數反饋以及邊緣描述確定零件所在位置,由于在自動裝配生產線中零件是不斷變化的。因此,還需要根據零件的運動速度確定接下來的所在位置,實現對零件的自動抓取功能。

總而言之,機器視覺識別系統通過視覺傳感器獲取零件的位置信息,并通過圖像處理和識別算法,計算位置偏移及角度旋轉量,并實時反饋給控制器,從而動態改變機械手的抓取操作,提高了裝配操作的柔性和效率。機器視覺識別系統構成簡單,穩定可靠,識別速度快,同時對環境要求不高,能夠適應不同生產操作環境,具有良好的應用前景。